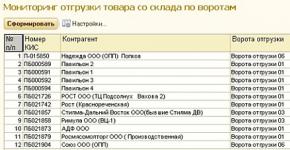
РЛС «Воронеж»: новая головная боль Америки. Современная радиолокация Как работает радиолокатор
Как сообщили «РИА» Новости со ссылкой на пресс-службу концерна «РТИ», радиолокационная станция дальнего обнаружения нового поколения «Воронеж-ДМ», размещенная в Красноярском крае, впервые обнаружила баллистическую цель со стороны Северной Америки. Данная РЛС, ставшая плодом работы двух институтов дальней радиолокации, является станцией высокой заводской готовности. Ее разворачивание занимает от года до полутора лет, в то время как на возведение станций предыдущих поколений уходило 5−10 лет.
Благодаря высокой технологичности разворачивания «Воронежей», до 2018 года в России будет создана сеть станций дальнего обнаружения, которая не только позволит полностью контролировать все ракетоопасные направления, но и наводить на цели противоракеты системы ПРО.
Однако и в настоящее время зона компетенции этих станций обширна. На боевом дежурстве находятся 4 станции, еще три работают в режиме опытной эксплуатации. Они контролируют воздушное пространство от побережья Марокко до Шпицбергена, от Южной Европы до северного побережья Африки, от западного побережья США до Индии и пространство над всей Европой, включая Великобританию.
Таким образом, подавляющее большинство «египетских пирамид», каковыми по размерам и затраченному на их возведение труду являются РЛС дальнего обнаружения предыдущего поколения, будет отправлено на покой. Система предупреждения о ракетном нападении (СПНР) будет базироваться на РЛС «Воронеж». Также в СПНР входит космический сегмент - спутниковая сеть. Она начала разворачиваться в прошлом году запуском спутника 14Ф142 «Тундра». Спутники отслеживают старты МБР по факелу работающих ракетных двигателей.
Сеть РЛС «Воронеж» начала разворачиваться в 2011 году с ввода в строй станции в Пионерском Калининградской области. К настоящему моменту 4 станции проделали впечатляющую работу. Ежегодно они обнаруживают и сопровождают до 40 запущенных космических и баллистических ракет. Предупредили о 30 опасных сближениях космических объектов с космическими аппаратами российской орбитальной группировки. 8 раз спасали МКС от космического мусора.
А в 2013 году «Воронеж» разоблачил американцев, которые решили провести тайную разведывательную операцию в отношении сирийской армии. Новая РЛС самым наглядным образом показала Пентагону, что отныне даже самые замаскированные их действия в контролируемой российскими радарами пространстве видны, как на ладони.
2 сентября 2013 года радар, расположенный в Армавире Краснодарского края зафиксировал пуск двух новейших американских сверхзвуковых ракет в акватории Средиземного моря. Причем он только один из всех существующих в мире РЛС такого типа смог обнаружить эти ракеты. Задача этих запусков заключалась в том, чтобы проверить время реакции и места дислокации систем ПВО Сирии, способных сбивать баллистические цели. Пентагон заявил, что данное мероприятие было направлено исключительно на проверку боеспособности систем ПВО Израиля с целью тренировки обслуживающих их военнослужащих.
Однако заместитель Министра обороны Российской Федерации Анатолий Антонов, встретившись 4 сентября с военными атташе США и Израиля, продемонстрировал им зафиксированные «Воронежем» параметры этих пусков. Предъявленные баллистические траектории точно указывали на цели и задачи этих запусков. При этом при определенных условиях, если бы ракеты, согласно сценарию, не самоликвидировались, они могли достичь границ России.
Этот прецедент показал американским стратегам, что новое, четвертое, поколение российских РЛС СПНР по целому ряду характеристик, причем главных, превосходит американские аналоги, большинство которых существует со времен холодной войны.
Время отклика фазированной антенной решетки «Воронежа» - 40 миллисекунд. У лучших американских антенн - 60 млсек. Ну, а самые древние американские радары СПНР и вовсе оборудованы гигантскими вращающимися параболическими антеннами. Время обработки сигнала и передачи в центр управления всех данных о скорости и траектории цели у «Воронежа» не превышает 6 секунд. У американцев на эту процедуру тратится 10 секунд. Ну, а разрешающие способности двух радаров отличаются уже в разы. «Воронеж» определяет координаты перемещающейся на расстоянии в несколько сотен километров с гиперзвуковой скоростью цели с ошибкой не более 11 метров.
Американские станции способны определять координаты цели с точностью в 120 метров по горизонтали и 90 метров по вертикали.
Причем дальность обнаружения целей сопоставима с дальностью «Воронежа» лишь у единственного, новейшего, радара AN/FPS-132. Она равна 5000 километров, против 6000 километров у российской РЛС. Предыдущие разработки американцев, продолжающие эксплуатироваться, дотягивают лишь до 4500 километров.
Строго говоря, «Воронеж» - это не одна тиражируемая станция, а семейство станций. Вот какие радары в него входят:
- «Воронеж-М» метрового диапазона. Разработка РТИ им. А.Л.Минца;
- «Воронеж-ДМ» дециметрового диапазона. Разработка НИИДАР;
- «Воронеж-ВП» - высокопотенциальная РЛС. Разработка РТИ им. А.Л.Минца. Работает в метровом диапазоне;
- «Воронеж-СМ» сантиметрового диапазона. В настоящий момент находится на стадии проектирования.
Станции обладают различными радиотехническими характеристиками, предопределенными используемыми схемами, принципами управления излучаемыми сигналами и способами обработки получаемых откликов. При этом за счет имеющейся возможности изменять характер сигнала станции способны «подстраиваться» к целям для лучшей их идентификации и сопровождения. Одновременно сопровождаются до 500 целей.
РЛС семейства «Воронеж» за счет высокой степени унификации узлов могут модернизироваться с целью повышения их возможностей по дальности и точности определения целей.
Появление РЛС «Воронеж-СМ» позволит использовать сеть СПНР не только для обнаружения и сопровождения, но и для наведения на цели ракетного оружия. Поскольку РЛС сантиметрового диапазона обладают разрешающей способностью, позволяющей решать такую задачу.
Дальность действия станций семейства находится в диапазоне от 4500 км до 6000 км. Высота обнаруживаемых объектов - до 4000 км. То есть «Воронеж» работает как с баллистическими и аэродинамическими летательными аппаратами, так и со спутниками.
В настоящий момент на боевом дежурстве находятся 4 станции:
- «Воронеж-М» (Лехтуси, Ленинградская область) контролирует воздушное пространство от побережья Марокко до Шпицбергена. Планируется модернизация, благодаря чему можно будет контролировать восточное побережье США;
- «Воронеж-ДМ» (Армавир, Краснодарский край) контролирует воздушное пространство от Южной Европы до северного побережья Африки;
- «Воронеж-ДМ» (Пионерский, Калининградская область) контролирует воздушное пространство над всей Европой, включая Великобританию;
- «Воронеж-ВП» (Мишлёвка, Иркутская область) контролирует воздушное пространство от западного побережья США до Индии.
3 станции, находящиеся на опытной эксплуатации, в этом году будут поставлены на боевое дежурство:
- «Воронеж-ДМ» (Енисейск, Красноярский край);
- «Воронеж-ДМ» (Барнаул, Алтайский край);
- «Воронеж-М» (Орск, Оренбургская область).
В настоящий момент строятся две РЛС - в Республике Коми и в Амурской области. Строительство еще одной - в Мурманской - запланировано на следующий год.
Помимо неоспоримых тактико-технических достоинств РЛС «Воронеж» обладают и экономическими преимуществами в сравнении с «египетскими пирамидами» предыдущего поколения.
У них значительно ниже энергопотребление. Если РЛС «Дарьял», введенная в строй в 1984 году, потребляет мощность, равную 50 МВт, то метровый и дециметровый «Воронеж» - по 0,7 МВт каждая, а новая высокопотенциальная РЛС - 10 МВт. Это благотворно сказывается не только на стоимости эксплуатации, но и на менее громоздкой системе охлаждения. Если «Дарьялу» требуется для этой цели 150 кубометров воды в час, то «Воронежу» вода для охлаждения не требуется.
Соответственно, новые станции значительно дешевле - 1,5 млрд. рублей против 10−20 млрд.
Снижение габаритов и энергопотребления при выдерживании высоких технических и эксплуатационных характеристик достигнуто за счет миниатюризации оборудования, а также благодаря использованию мощной вычислительной техники, оптимизирующей работу станций и позволяющей добиться более высокой разрешающей способности при снижении энергозатрат.
По информации Минобороны РФ, в 2017 году в Воздушно-космические силы (ВКС) России было поставлено 70 (РЛС). Радары необходимы для проведения радиолокационной разведки, в задачи которой входит своевременное обнаружение различных динамических целей.
«В подразделения радиотехнических войск ВКС поступило более 70 новейших РЛС в 2017 году. Среди них радиолокационные комплексы средних и больших высот «Небо-М», РЛС средних и больших высот «Противник», «Всевысотный обнаружитель», «Сопка-2», РЛС малых высот «Подлёт-К1» и «Подлёт-М», «Каста-2-2», «Гамма-С1», а также современные комплексы средств автоматизации «Фундамент» и другие средства», — говорится в сообщении Минобороны.
Как отмечают в ведомстве, главной особенностью новейших отечественных РЛС является то, что они созданы на современной элементной базе. Все процессы и операции, которые выполняют эти машины, максимально автоматизированы.
При этом системы управления и техническое обслуживание радиолокационных станций стали более простыми.
Элемент обороны
Радиолокационные станции в ВКС России предназначены для обнаружения и сопровождения воздушных целей, а также для целеуказания зенитным ракетным комплексам (ЗРК). РЛС являются одним из ключевых элементов противовоздушной, противоракетной и космической обороны России.
Радиолокационный комплекс «Небо-М» способен обнаруживать цели на дальности от 10 до 600 км (круговой обзор) и от 10 до 1800 км (секторный обзор). Станция может отслеживать как крупные, так и малоразмерные объекты, выполненные по стелс-технологии. Время развёртывания «Небо-М» составляет 15 минут.
Для определения координат и сопровождения самолётов стратегической и тактической авиации и обнаружения американских ракет «воздух — поверхность» типа ASALM ВКС России используют радиолокационную станцию «Противник-ГЕ». Характеристики комплекса позволяют ему сопровождать не менее 150 целей на высоте от 100 м до 12 км.
Мобильный радиолокационный комплекс 96Л6-1/96Л6Е «Всевысотный обнаружитель» применяется в Вооружённых силах РФ для выдачи целеуказания средствам ПВО. Уникальная машина может определять широкий спектр аэродинамических целей (самолётов, вертолётов и беспилотников) на высотах до 100 км.
РЛС «Подлёт-К1» и «Подлёт-М», «Каста-2-2», «Гамма-С1» используются для мониторинга воздушной обстановки на высотах от нескольких метров до 40—300 км. Комплексы распознают все виды авиационной и ракетной техники и могут эксплуатироваться при температурах от -50 до +50 °C.
- Мобильный радиолокационный комплекс обнаружения аэродинамических и баллистических объектов на средних и больших высотах «Небо-М»
Основной задачей радиолокационного комплекса «Сопка-2» является получение и анализ информации о воздушной обстановке. Самым активным образом Минобороны использует эту РЛС в Арктике. Высокая разрешающая способность «Сопки-2» позволяет распознавать отдельные воздушные цели, которые летят в составе группы. «Сопка-2» способна обнаруживать до 300 объектов в пределах 150 км.
Практически все вышеперечисленные радиолокационные комплексы обеспечивают безопасность Москвы и Центрального промышленного региона. К 2020 году доля современного вооружения в частях ПВО московской зоны ответственности должна достичь 80%.
На стадии перевооружения
Все современные РЛС состоят из шести основных компонентов: передатчик (источник электромагнитного сигнала), антенная система (фокусировка сигнала передатчика), радиоприёмник (обработка принятого сигнала), выходные устройства (индикаторы и ЭВМ), аппаратура помехозащиты и источники электропитания.
Отечественные РЛС могут засекать самолёты, беспилотники и ракеты, отслеживая их передвижение в режиме реального времени. Радары обеспечивают своевременное поступление информации о ситуации в воздушном пространстве вблизи рубежей РФ и за сотни километров от госграниц. На военном языке это называется радиолокационной разведкой.
Стимулом для совершенствования радиолокационной разведки РФ являются усилия иностранных государств (прежде всего США) по созданию малозаметных самолётов, крылатых и баллистических ракет. Так, на протяжении последних 40 лет Соединённые Штаты активно развивают стелс-технологии, которые призваны обеспечить незаметный для РЛС подлёт к рубежам противника.
Огромный военный бюджет (свыше $600 млрд) даёт возможность американским конструкторам экспериментировать с радиопоглощающими материалами и геометрическими формами летательных аппаратов. Параллельно с этим США совершенствуют средства радиолокационной защиты (обеспечение помехозащищённости) и аппараты радиолокационного подавления (создание помех для приёмников РЛС).
Военный эксперт Юрий Кнутов убеждён, что радиолокационная разведка РФ способна обнаруживать практически все виды воздушных целей, включая американские истребители пятого поколения F-22 и F-35, самолёты-невидимки (в частности, стратегический бомбардировщик B-2 Spirit) и объекты, летящие на предельно малых высотах.

- Экран РЛС, который показывает изображение цели, синхронизированное с движением антенны
- Министерство обороны Российской Федерации
«От станции «Небо-М» не спрячутся даже новейшие американские самолёты. Минобороны придаёт огромное значение развитию РЛС, ведь это глаза и уши ВКС. Преимуществами новейших станций, поступающих сейчас на вооружение, являются большая дальность, высокая помехозащищённость и мобильность», — сообщил в беседе с RT Кнутов.
Эксперт отметил, что США не прекращают работы по развитию систем радиолокационного подавления, осознавая уязвимое положение перед российскими радарами. Кроме того, на вооружении американской армии стоят специальные противорадиолокационные ракеты, которые наводятся по излучению станций.
«Новейшие российские РЛС отличает невероятный уровень автоматизации по сравнению с предыдущим поколением. Поразительный прогресс был достигнут в улучшении мобильности. В советские годы на то, чтобы развернуть и свернуть станцию, требовались чуть ли не сутки. Сейчас это делается в пределах получаса, а иногда и в течение нескольких минут», — рассказал Кнутов.
Собеседник RT полагает, что радиолокационные комплексы ВКС приспособлены к противодействию высокотехнологичному противнику, снижая вероятность его проникновения в воздушное пространство РФ. По словам Кнутова, сегодня радиотехнические войска России находятся на стадии активного перевооружения, но к 2020 году современными РЛС будет укомплектовано большинство частей.
На Кольском полуострове России возведут сверхмощную радиолокационную станцию «Воронеж-ДМ». Она прикроет основное ракетоопасное направление. РЛС под Мурманском будет примерно в три раза мощнее всех уже созданных и строящихся радиолокаторов высокой заводской готовности. «Воронеж-ДМ» сможет на большой дальности обнаруживать баллистические цели и определять трассы их полета. «Ведется строительство фундаментов под огромный радиолокатор на горе на высоте более 400 метров над уровнем моря. Он будет обеспечивать контроль воздушно-космического пространства над Арктикой и основным ракетоопасным...
В России разрабатывается новая модификация загоризонтной радиолокационной станции «Подсолнух»
11.11.2016
Улучшенная версия РЛС получит наименование «Подсолнух-Ц». Она будет отличаться большей дальностью работы и более эффективной защитой от помех. Об этом пишет Интерфакс, ссылаясь на главу предприятия-разработчика РЛС - НПК «Научно-исследовательский институт дальней радиосвязи» Александра Милославского. Радар «Подсолнух» способен контролировать 200-мильную прибрежную зону. РЛС позволяет в автоматическом режиме за пределами радиогоризонта одновременно обнаружить, сопровождать и классифицировать до 300 морских и 100 воздушных объектов, определять их координаты и выдавать по ним целеуказания комплексам и системам вооружения кораблей и средств...
Защита космического масштаба: армия РФ получила пять уникальных РЛС «Небо-У», опрокидывающих стратегию США. Радиолокационные станции будут установлены на территории нескольких субъектов РФ в северо-западном регионе. «Небо-У» - это станция предназначенная для обнаружения воздушных целей различной категории: от самолетов до крылатых управляемых ракет, включая гиперзвуковые баллистические с использованием «стелс» технологий на дальности 600 км. После обнаружения объекта РЛС измеряет координаты, определяет его государственную принадлежность, а также производит пеленгацию постановщиков активных помех. «Управление...
Сегодня стартовал 2-й Международный военно-технический форум «Армия-2016». Он, как и в первый раз, пройдет на трех площадках, базовой из которых будет Парк Патриот. Также будет шоу с применением всех видов оружия на полигоне в Алабино, а также показ авиационной техники и пилотажных групп на авиабазе Кубинка. В субботу удалось посмотреть на открытую площадку, где будет представленна военная техника от Минобороны России и российской и иностранной оборонной промышленности. Всего в динамическом показе и в статической экспозиции...
Соединения Центрального военного округа, дислоцированные в Сибири, получили новые цифровые радиорелейные станции, которые передают видео по радиосигналу и обеспечивают навигацию через спутниковую систему Глонасс. Об этом сообщили ТАСС в среду в пресс-службе ЦВО. «Подразделения войск связи получили подвижные цифровые радиорелейные станции Р-419Л1 и Р-419ГМ на базе автомобиля Камаз-4350, которые позволяют организовывать видеоконференцсвязь и передавать видеоданные по радиосигналу», — пояснили в...
Трехкоординатная радиолокационная станция предназначена для контроля воздушного пространства, автоматического обнаружения и определения координат целей. Модернизированная радиолокационная станция серии «Десна» поступила на вооружение в одну из радиотехнических воинских частей, дислоцированных в Хабаровском крае, сообщила во вторник пресс-служба Восточного военного округа (ВВО). «В Хабаровском крае к несению боевого дежурства по контролю за воздушным пространством приступил расчет новой радиолокационной станции (РЛС) «Десна-мм», - ...
В Воркуте начинают строить радиолокационную станцию системы предупреждения о ракетном нападении. Церемония закладки памятной капсулы в первый камень фундамента РЛС нового поколения «Воронеж-М» состоялась в нескольких километрах от поселка Воргашор. В митинге приняли участие руководитель администрации Воркуты Евгений Шумейко, глава города Валентин Сопов, начальник главного центра предупреждения о ракетном нападении генерал-майор Игорь Протопопов, начальник филиала строительного управления при Спецстрое России...
Обеспечивать наблюдение за ситуацией в арктической зоне будут новые загоризонтные радиолокационные станции поверхностной волны «Подсолнух». «Наши станции поверхностной волны «Подсолнух» будут решать вопросы, связанные с нашим арктическим побережьем», — сообщил журналистам генеральный директор ОАО «РТИ» Сергей Боев. По его словам, в самое ближайшее время будет принято решение о том, как будет развиваться это направление. «То ли это будет отдельная ОКР...
Давно известная радиолокация ныне предстает перед нами совершенно в новом свете, если даже в общих чертах познакомиться с ее последними достижениями. Современному ее состоянию, перспективам и посвящена публикуемая обзорная статья.
В наше время радиолокация получила широчайшее применение. Ее методы и средства используются для обнаружения объектов и контроля обстановки в воздушном, космическом, наземном и надводном пространствах. Современная техника позволяет с большой точностью измерять координаты положения самолета или ракеты, следить за их движением, определять не только формы объектов, но и структуру их поверхности. Радиолокационные методы открывают возможность изучать недра Земли и даже внутренние неоднородности поверхностных слоев на других планетах. Но если говорить о чисто "земных делах" - гражданском и военном применении радиолокации, то ее методы незаменимы, например, в организации управления воздушным движением, наведении, распознавании объектов, определении их принадлежности.
В зависимости от конкретного назначения современные радиолокационные станции (РЛС) имеют характерные особенности. Из всего их разнообразия значительную долю составляют РЛС обнаружения. Связано это с тем, что радиолокационный метод обнаружения является основным как на Земле, в воздухе, на море, так и в космосе.
С помощью радиолокации производится так называемая пространственная селекция - обнаружение объекта по отраженному сигналу, временная селекция, когда по задержке возвращения отраженного сигнала устанавливается дальность до цели. Существует еще понятие частотная селекция, позволяющая отслеживать по изменению частотного спектра сигнала радиальную скорость наблюда емого объекта.
Современные РЛС, как правило, трехкоординатные. Они определяют дальность, угол места и азимут. При этом применяются антенны, имеющие узкие диаграммы направленности в вертикальной и горизонтальной плоскостях. Чтобы обеспечить заданные точности определения угловых координат и не увеличивать время обзора, применяется метод параллельно-последовательного обзора пространства, когда одновременно используется несколько лучей, а зона перекрывается последовательным перемещением этих лучей, что позволяет сократить количество приемных каналов.
Каким же образом можно избежать мешающих отражений от местных предметов и неоднородностей в атмосфере? Здесь, в арсенале радиолокации, - режим селекции по частоте. Его суть состоит в том, что движущийся относительно РЛС объект отражает сигнал со сдвигом по частоте (эффект Доплера). Если этот сдвиг составляет даже всего 10E-7 от значений несущей частоты, то современные методы обработки выделят разницу и радиолокатор "увидит" цель. Это обеспечивается благодаря поддержанию необходимой стабильности сигналов или, как говорят специалисты радиолокации, сохранению их когерентности.
Это важно, например, потому, что объекты, вызывающие мешающие отражения, часто не являются неподвижными (раскачиваются деревья, наблюдается волнение по водной поверхности, перемещаются облака и т. п.). Такие отраженные сигналы также имеют сдвиг по частоте. Чтобы расширить возможности РЛС, применяют различные режимы работы станций и их сочетания. При амплитудном режиме удается добиться большей дальности действия РЛС и определять цели, движущиеся с нулевой радиальной скоростью. Такой метод обычно используется для обзора в дальней зоне, где нет мешающих отражений. Когерентный режим применяют в ближней зоне обзора, где много мешающих отражений.
Для снижения пиковой мощности передатчиков РЛС используются сложные сигналы, которые обеспечивают достаточную точность и разрешающую способность. При этом приходится усложнять аппаратуру. Однако в данном случае компромисс вполне оправдан, так как позволяет обеспечить требуемую дальность обнаружения и не иметь высокого значения пиковой мощности.
Во многих современных РЛС используются фазированные антенные решетки (ФАР), в
том числе активного типа, в каждую ячейку которых встроены свой передатчик и
входные цепи приемника. Это, конечно, усложняет конструкцию станции и ее
обслуживание, однако позволяет снизить потери при передаче и приеме, повысить
возможность работы станции в сложной обстановке, в том числе в условиях
искусственных помех. Вместе с тем включение в ФАР приемопередатчиков - один
из важных способов повышения надежности РЛС. Даже при выходе из строя
нескольких модулей передатчиков и приемников РЛС продолжает работать.
Непременным качеством современных РЛС является сохранение в течение достаточно
длительного времени и в разных погодных условиях стабильности функционирования
приемной аппаратуры. Такую задачу помогло решить внедрение в радиолокацию
устройств цифровой обработки сигналов.
Важным требованием к современным РЛС обнаружения является их мобильность. Они рассчитаны на движение своим ходом по различным дорогам. На их свертывание и развертывание уходит от 5 до 15 минут. Здесь конструкторам пришлось пойти на резкое ограничение массы и габаритов РЛС. Решить эту задачу во многом удалось без ухудшения основных параметров по дальности, точности, зоне обзора, темпу обзора и т.д.
Как выглядит современная радиолокационная станция обнаружения? Одним из ее главных элементов стала фазированная антенная решетка (рис.1). Она вращается и формирует обычно несколько лучей на прием и один луч на передачу. Принимаемые сигналы усиливаются, а затем преобразуются в цифровую форму. Дальнейшая обработка информации идет в цифровом виде с помощью элементов вычислительной техники. РЛС фактически в автоматическом режиме обнаруживает цели, измеряет координаты, определяет параметры трассы движения.
Оператор почти полностью освобожден от рутинной работы. Его функции состоят в том, чтобы в необходимых случаях выбрать требуемый режим работы РЛС, т.е. помочь в ее адаптации к обстановке и поддерживать работоспособность РЛС.
Несмотря на общие закономерности построения радиолокационных станций по своему назначению, они весьма разнообразны. Например, современные РЛС обнаружения бывают большой, средней, малой дальности; двух- и трехкоординатные; мобильные, подвижные, стационарные и, наконец, для обнаружения на малых и на больших высотах.
Что вкладывают создатели радиолокационных систем в понятие "современная РЛС"? Во многом оно оценивается критерием "эффективность-стоимость" и может быть выражено отношением, в числителе которого - обобщенные тактико-техническая характеристика станции, а в знаменателе - ее стоимость. При такой оценке упрощенные РЛС будут иметь невысокий показатель за счет малого числителя, а переусложненные - невысокий показатель за счет большого знаменателя. Оптимальное отношение для современных РЛС соответствует определенной совокупности примененных при ее создании научно-технических достижений, которые позволяют повысить ее возможности, причем достижений, технологически освоенных в производстве и поэтому приемлемых в экономическом плане. И наконец, понятие "современная РЛС" еще совсем необязательно означает, что она имеет по всем параметрам лучшие показатели, достигнутые мировой радиолокационной техникой. В каждую конструкцию станции должен включаться такой набор технических новинок, который наилучшим образом позволил бы ей обеспечить требуемую совокупность характеристик.
Вместе с тем необходимо подчеркнуть, что при функциональной схожести и
многоотраслевом характере современных РЛС они, как правило, значительно
отличаются друг от друга. В РЛС обнаружения, в зависимости от их назначения,
применяются антенны от единиц до сотен квадратных метров, средняя излучаемая
мощность составляет от сотен ватт до единиц мегаватт.
Естественно, проблемы совершенствования радиолокационных систем сегодня решаются на базе последних достижений механики, электромеханики, энергетики, радиоэлектроники, вычислительной техники и т.д. Все это говорит о том, что создание современных РЛС является сложной научно-технической и инженерной задачей.
Среди радиолокационной техники, которая появилась в последнее время, особенно выделяются своей надежностью и высокими функциональными характеристиками радиолокаторы военного назначения. К ним можно отнести РЛС для обнаружения средств нападения, многие из которых характеризуются малой отражающей поверхностью, выполненной по так называемой технологии "Стелс" ("Невидимка"). Нападение осуществляется на фоне искусственных активных и пассивных помех радиолокационному обнаружению. При этом атаке подвергается и сама РЛС: по сигналам, которые она излучает, на нее наводятся противорадиолокационные ракеты (ПРР). Естественно поэтому, что радиолокационный комплекс, решая свои основные боевые задачи, должен иметь и средства защиты от ПРР.
Отечественная радиолокация добилась заметных успехов. Ряд созданных в России радиолокационных систем является нашим национальным достоянием и находится на уровне мировых. К их числу вполне можно отнести РЛС метрового диапазона волн, в том числе трехкоординатные станции.
Очевидно, более подробно стоит познакомиться с возможностями одной из новых наших трехкоординатных станций кругового обзора, работающей в метровом диапазоне (рис.2). Она выдает информацию о местонахождении объекта в виде трех координат: по азимуту - 360°, по дальности на расстоянии до 1200 км и по высоте - до 75 км.
Преимущества таких станций, с одной стороны, - неуязвимость для снарядов самонаведения и противолокационных ракет, обычно использующих более коротковолновые диапазоны, а с другой - способность обнаруживать самолеты "Невидимки". Ведь одна из причин "невидимости" этих объектов - их специальная форма, имеющая малое обратное отражение. В метровом диапазоне эта причина исчезает, так как размеры самолета сравнимы с длиной волны и его форма уже не играет решающей роли. Невозможно также, не ухудшая аэродинамику, покрыть самолет достаточным слоем радиопоглощающего материала. Несмотря на то что для работы в этом диапазоне требуются антенны больших габаритов, что станции имеют некоторые другие недостатки, указанные преимущества РЛС метрового диапазона предопределили их развитие и растущий интерес к ним во всем мире.
Несомненным достижением отечественной радиолокации можно назвать работающие в дециметровом диапазоне волн РЛС для обнаружения целей, летящих на малых высотах (рис.3). Такая станция на фоне интенсивных отражений от местных предметов и метеообразований способна обнаружить цели на малых и предельно малых высотах и сопровождать вертолеты, самолеты, дистанционно пилотируемые аппараты, крылатые ракеты. В автоматическом режиме она определяет дальность, азимут, эшелон высоты и трассу. Вся информация может быть передана по радиоканалу на расстояние до 50 км. Характерной особенностью станций, о которых идет речь, является их высокая мобильность (малое время развертывания и свертывания) и возможность простым способом подъема антенн на высоту 50 м, т.е. над любой растительностью.
Эти и подобные им РЛС по многим своим характеристикам не имеют аналогов в мире.
Читателей журнала "Радио", наверное, интересует, в каком направлении идет развитие РЛС, какими они будут в ближайшем будущем? Прогнозируется, что будут создаваться, как и прежде, станции самого разного назначения и уровня сложности. Наиболее сложными будут трехкоординатные РЛС. Их общими чертами останутся принципы, заложенные в современных трехкоординатных системах кругового (или секторного) обзора. Главными их функциональными частями станут активные твердотельные (полупроводниковые) фазированные антенные решетки. Уже в ФАР осуществится преобразование сигнала в цифровую форму.
Особое место в РЛС займет вычислительный комплекс. Он возьмет на себя все основные функции работы станции: обнаружение целей, определение их координат, а также управление станцией, включая ее адаптацию к помеховой обстановке, контроль за параметрами станции, проведение ее диагностики.
И это не все. Вычислительный комплекс обобщит полученные данные, установит связь с потребителем и передаст ему полную информацию в готовом виде.
Сегодняшние достижения науки и техники позволяют прогнозировать именно такой облик РЛС ближайшего будущего. Однако считается сомнительной возможность создания универсального локатора, способного решать все задачи обнаружения. Акцент делается на комплексы разных РЛС, объединенных в систему обнаружения.
При этом получит развитие нетрадиционное построение систем - многопозиционные радиолокационные комплексы, в том числе пассивные и активнопассивные, скрытые от разведки.
Капитан М. Виноградов,
кандидат технических наук
Современные радиолокационные средства, устанавливаемые на самолетах и космических аппаратах, в настоящее время представляют один из наиболее интенсивно развивающихся сегментов радиоэлектронной техники. Идентичность физических принципов, лежащих в основе построения этих средств, делает возможным рассмотрение их в рамках одной статьи. Основные различия между космическими и авиационными РЛС заключаются в принципах обработки радиолокационного сигнала, связанными с различным размером апертуры, особенностями распространения радиолокационных сигналов в различных слоях атмосферы, необходимостью учета кривизны земной поверхности и т. д. Несмотря на подобного рода различия, разработчики РЛС с синтезированием апертуры (РСА) прилагают все усилия для того, чтобы добиться максимальной схожести возможностей данных средств разведки.
В настоящее время бортовые РЛС с синтезированием апертуры позволяют решать задачи видовой разведки (вести съемку земной поверхности в различных режимах), селекции мобильных и стационарных целей, анализа изменений наземной обстановки, осуществлять съемку объектов, скрытых в лесных массивах, обнаружение заглубленных и малоразмерных морских объектов.
Основным назначением РСА является детальная съемка земной поверхности.

|
|
| Рис. 1. Режимы съемки современных РСА (а — детальный, б - обзорный, в - сканирующий) | Рис. 2. Примеры реальных радиолокационных изображений с разрешениями 0,3 м (вверху) и 0,1 м (внизу) |

|
|
| Рис. 3. Вид изображений при разных уровнях детализации | |

|
|
| Рис. 4. Примеры фрагментов реальных участков земной поверхности, полученных при уровнях детализации DTED2 (слева) и DTED4 (справа) | |
За счет искусственного увеличения апертуры бортовой антенны, основной принцип которого заключается в когерентном накоплении отраженных радиолокационных сигналов на интервале синтезирования, удается получить высокое разрешение по углу. В современных системах разрешение может достигать десятков сантиметров при работе в сантиметровом диапазоне длин волн. Аналогичные значения разрешения по дальности достигаются за счет применения внутриимпульсной модуляции, например, линейно-частотной модуляции (ЛЧМ). Интервал синтезирования апертуры антенны прямо пропорционален высоте полета носителя РСА, что обеспечивает независимость разрешения съемки от высоты.
В настоящее время существуют три основных режима съемки земной поверхности: обзорный, сканирующий и детальный (рис. 1). В обзорном режиме съемка земной поверхности осуществляется непрерывно в полосе захвата, при этом разделяют боковой и переднебоковой режим (в зависимости от ориентации главного лепестка диаграммы направленности антенны). Накопление сигнала осуществляется в течение времени, равного расчетному интервалу синтезирования апертуры антенны для данных условий полета носителя РЛС. Сканирующий режим съемки отличается от обзорного тем, что съемка ведется на всей ширине полосы обзора, полосами равными ширине полосы захвата. Данный режим используется исключительно в РЛС космического базирования. При съемке в детальном режиме накопление сигнала осуществляется на увеличенном по сравнению с обзорным режимом интервале. Увеличение интервала осуществляется за счет синхронного с движением носителя РЛС перемещения главного лепестка диаграммы направленности антенны таким образом, чтобы облучаемый участок постоянно находился в зоне съемки. Современные системы позволяют получать снимки земной поверхности и расположенных на ней объектов с разрешениями порядка 1 м для обзорного и 0,3 м для детального режимов. Компания «Сандия» анонсировала создание РСА для тактических БЛА, имеющего возможность вести съемку с разрешением 0,1 м в детальном режиме. Существенное значение на результирующие характеристики РСА (в плане съемки земной поверхности) оказывают применяемые методы цифровой обработки принятого сигнала, важной составляющей которых являются адаптивные алгоритмы коррекции траекторных искажений. Именно невозможность выдерживать в течение длительного времени прямолинейную траекторию движения носителя не позволяет получать в непрерывном обзорном режиме съемки разрешения сопоставимые с детальным режимом, хотя никаких физических ограничений на разрешение в обзорном режиме не существует.
Режим инверсного синтезирования апертуры (ИРСА) позволяет осуществлять синтезирование апертуры антенны не за счет движения носителя, а за счет движения облучаемой цели. При этом речь может идти не о поступательном движении, характерном для наземных объектов, а о маятниковом движении (в разных плоскостях), характерном для плавучих средств, раскачивающихся на волнах. Данная возможность определяет основное назначение ИРСА - обнаружение и идентификация морских объектов. Характеристики современных ИРСА позволяют уверенно обнаруживать даже малоразмерные объекты, такие как перископы подводных лодок. Вести съемку в данном режиме имеют возможность все самолеты, состоящие на вооружении ВС США и других государств, в задачи которых входит патрулирование береговой зоны и акваторий. Получаемые в результате съемки изображения по своим характеристикам аналогичны изображениям, получаемым в результате съемки с прямым (неинверсным) синтезированием апертуры.
Режим интерферометрической съемки (Interferometric SAR - IFSAR) позволяет получать трехмерные изображения земной поверхности. При этом современные системы имеют возможность вести одноточечную съемку (то есть использовать одну антенну) для получения трехмерных изображений. Для характеристики данных изображений помимо обычного разрешения вводится дополнительный параметр, называемый точность определения высоты, или разрешение по высоте. В зависимости от значения данного параметра определяют несколько стандартных градаций трехмерных изображений (DTED - Digital Terrain Elevation Data):
DTEDO.............................. 900 м
DTED1.............................. 90m
DTED2............................ 30m
DTED3.............................. 10m
DTED4............................ Зм
DTED5.............................. 1m
Вид изображений урбанизированной территории (модель), соответствующий различным уровням детализации, представлен на рис. 3.
Уровни 3-5 получили официальное название «данных с высоким разрешением» (HRTe-High Resolution Terrain Elevation data). Определение местоположения наземных объектов на изображениях уровня 0-2 ведется в системе координат WGS 84, отсчет высоты осуществляется относительно нулевой отметки. Система координат изображений с высоким разрешением в настоящий момент не стандартизирована и находится на стадии обсуждения. На рис. 4 представлены фрагменты реальных участков земной поверхности, полученные в результате стереосъемки с различным разрешением.
В 2000 году американский МТКК «Шаттл» в рамках проекта SRTM (Shuttle Radar Topography Mission), целью которого являлось получение картографической информации крупных масштабов, выполнил интерферометрическую съемку экваториальной части Земли в полосе от 60° с. ш. до 56° ю. ш., получив на выходе трехмерную модель земной поверхности в формате DTED2. Для получения детальных трехмерных данных в США разрабатывается проект NGA HRTe? в рамках которого будут доступны изображения уровней 3-5.
Помимо радиолокационной съемки открытых участков земной поверхности, бортовая РЛС имеет возможность получать изображения сцен, скрытых от глаз наблюдателя. В частности, она позволяет обнаруживать объекты, скрытые в лесных массивах, а также, находящиеся под землей.
Проникающая РЛС (GPR, Ground Penetrating Radar) - система дистанционного зондирования, принцип действия которой основан на обработке сигналов, отраженных от деформированных или отличающихся по своему составу участков, находящихся в однородном (или относительно однородном) объеме. Система зондирования земной поверхности позволяет обнаруживать находящиеся на различной глубине пустоты, трещины, заглубленные объекты, выявлять участки различной плотности. При этом энергия отраженного сигнала сильно зависит от поглощающих свойств почвы, размеров и формы цели, степени неоднородности граничных областей. В настоящее время GPR помимо военно-прикладной направленности развился в коммерчески выгодную технологию.
Зондирование земной поверхности происходит путем облучения импульсами с частотой 10 МГц - 1,5 ГГц. Облучающая антенна может находиться на земной поверхности или расположена на борту летательного аппарата. Часть энергии облучения отражается от изменений в подповерхностной структуре земли, большая же часть проникает дальше в глубину. Отраженный сигнал принимается, обрабатывается, и результаты обработки отображаются на дисплее. При движении антенны генерируется непрерывное изображение, отражающее состояние подповерхностных слоев почвы. Так как фактически отражение происходит из-за различия ди-электрических проницаемо-стей различных веществ (или разных состояний одного вещества), то зондированием можно выявлять большое количество естественных и искусственных дефектов в однородной массе подповерхностных слоев. Глубина проникновения зависит от состояния почвы на месте облучения. Уменьшение амплитуды сигнала (поглощение или рассеяние) в значительной мере зависит от ряда свойств почвы, основное из которых - ее электропроводность. Так, оптимальными для зондирования являются песчаные почвы. Гораздо менее пригодны для этого глинистые и очень влажные почвы. Хорошие результаты показывает зондирование сухих материалов, таких как гранит, известняк, бетон.
Разрешениепризондированииможетбыть улучшено за счет повышения частоты излучаемых волн. Однако увеличение частоты отрицательно сказывается на глубине проникновения излучения. Так, сигналы с частотой 500-900 МГц могут проникать на глубину 1-3 м и обеспечивают разрешение до 10 см, а с частотой 80-300 МГц проникают на глубину 9-25 м, но разрешение составляет порядка 1,5 м.
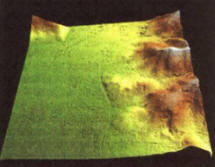
Основным военным назначением РЛС подповерхностного зондирования является обнаружение заложенных мин. При этом РЛС, установленная на борту летательного аппарата, например вертолета, позволяет непосредственно вскрывать карты минных полей. На рис. 5 представлены изображения, полученные с помощью РЛС, установленной на борту вертолета, отражающие расположение противопехотных мин.
Бортовая РЛС, предназначенная для обнаружения и слежения за объектами, скрытыми в лесных массивах (FO-PEN - FOliage PENetrating), позволяет обнаруживать малоразмерные объекты (движущиеся и стационарные), скрытые кронами деревьев. Съемка объектов, скрытых в лесных массивах, ведется аналогично обычной съемке в двух режимах: обзорном и детальном. В среднем в обзорном режиме ширина полосы захвата составляет 2 км, что позволяет получать на выходе изображения участков земной поверхности 2x7 км; в детальном режиме съемка осуществляется участками 3х3 км. Разрешение съемки зависит от частоты и варьируется от 10 м при частоте 20-50 МГц до 1 м при частоте 200-500 МГц.
Современные методы анализа изображений позволяют с достаточно высокой вероятностью обнаруживать и производить последующую идентификацию объектов на полученном радиолокационном изображении. При этом обнаружение возможно на снимках как с высоким (менее 1 м), так и с низким (до 10 м) разрешением, в то время как для распознавания требуются изображения с достаточно высоким (порядка 0,5 м) разрешением. И даже в этом случае можно говорить в большей части только о распознавании по косвенным признакам, поскольку геометрическая форма объекта очень сильно искажена из-за наличия сигнала, отраженного от лиственного покрова, а также вследствие появления сигналов со смещением частоты за счет доплеровского эффекта, возникающего в результате колебания листвы на ветру.
На рис. 6 представлены изо-бражения (оптическое и радиолокационное) одного и того же участка местности. Объекты (колонна машин), невидимые на оптическом изображении, хорошо видны на радиолокационном, однако осуществить идентификацию данных объектов, абстрагировавшись от внешних признаков (движение по дороге, расстояние между машинами и т. д.), невозможно, так как при данном разрешении информация о геометрической структуре объекта отсутствует полностью.
Детальность получаемых радиолокационных изображений позволила реализовать на практике еще ряд особенностей, которые, в свою очередь, сделали возможным решение ряда важных практических задач. К одной из таких задач относится отслеживание изменений, произошедших на некотором участке земной поверхности за определенный период времени - когерентное детектирование. Длительность периода обычно определяется периодичностью патрулирования заданного района. Отслеживание изменений осуществляется на основе анализа покоординатно совмещенных изображений заданного района, полученных последовательно друг за другом. При этом возможны два уровня детализации анализа.

|

|
| Рис 5. Карты минных полей в трехмерном представлении при съемке в различных поляризациях: модель (справа), пример изображения реального участка земной поверхности со сложной подповерхностной обстановкой (слева), полученного с помощью РЛС, установленной на борту вертолета | |

|
|
| Рис. 6. Оптическое (вверху) и радиолокационное (внизу) изображения участка местности с движущейся по лесной дороге колонной автомобилей | |

|
|
Первый уровень предполагает обнаружение значительных изменений и основывается на анализе амплитудных отсчетов изображения, несущих основную визуальную информацию. Чаще всего в эту группу относятся изменения, которые сможет увидеть человек, просматривая одновременно два сформированных радиолокационных изображения. Второй уровень базируется на анализе фазовых отсчетов и позволяет выявлять изменения, невидимые человеческому глазу. К таковым можно отнести появление следов (машины или человека) на дороге, изменение состояния окон, дверей («открыто - закрыто») и т. д.
Другой интересной возможностью РСА, также анонсированной компанией «Сандия», является радиолокационная видеосъемка. В данном режиме дискретное формирование апертуры антенны от участка к участку, характерное для непрерывного обзорного режима, заменено на параллельное многоканальное формирование. То есть в каждый момент времени синтезируется не одна, а несколько (количество зависит от решаемых задач) апертур. Своего рода аналогом количества формируемых апертур является частота кадров в обычной видеосъемке. Данная возможность позволяет реализовывать селекцию движущихся целей на базе анализа полученных радиолокационных изображений, применяя принципы когерентного детектирования, что является по своей сути альтернативой стандартным РЛС, осуществляющим селекцию движущихся целей на основе анализа до-плеровских частот в принятом сигнале. Эффективность реализации подобных селекторов движущихся целей весьма сомнительна ввиду значительных аппаратно-программных затрат, поэтому подобные режимы с большой вероятностью так и останутся не более чем изящным способом решения задачи селекции, несмотря на открывающиеся возможности селектировать цели, движущиеся с очень низкими скоростями (менее 3 км/ч, что недоступно доплеровским СДЦ). Непосредственно видеосъемка в радиолокационном диапазоне в настоящее время также не нашла применения, опять же из-за высоких требований к быстродействию, поэтому действующих образцов военной техники, реализующих на практике данный режим, нет.
Логическим продолжением совершенствования техники съемки земной поверхности в радиолокационном диапазоне является развитие подсистем анализа полученной информации. В частности, важное значение приобретает разработка систем автоматического анализа радиолокационных изображений, позволяющих обнаруживать выделять и распознавать наземные объекты, попавшие в зону съемки. Сложность создания подобных систем связана с когерентной природой радиолокационных изображений, явления интерференции и дифракции в которых приводят к появлению артефактов - искусственных бликов, аналогичных тем, которые появляются при облучении цели с большой эффективной поверхностью рассеяния. Кроме того, качество радиолокационного изображения несколько ниже, чем качество аналогичного (по разрешению) оптического изображения. Все это приводит к тому, что эффективных реализаций алгоритмов распознавания объектов на радиолокационных изображениях в настоящее время не существует, но количество работ, проводимых в данной области, определенные успехи, достигнутые в последнее время, позволяют предположить, что в недалеком будущем можно будет вести речь об интеллектуальных беспилотных разведывательных аппаратах, имеющих возможность производить оценку наземной обстановки по результатам анализа информации, полученной собственными бортовыми средствами радиолокационной разведки.
Другим направлением развития является комплексирование, то есть согласованное объединение с последующей совместной обработкой, информации от нескольких источников. Это могут быть РЛС, ведущие съемку в различных режимах, либо РЛС и другие средства разведки (оптические, ИК, многоспектральные и т. п.).
Таким образом, современные РЛС с синтезированием апертуры антенны позволяют решать широкий спектр задач, связанных с ведением радиолокационной съемки земной поверхности независимо от времени суток и погодных условий, что делает их важным средством добывания информации о состоянии земной поверхности и находящихся на ней объектах.
Зарубежное военное обозрение №2 2009 С.52-56